728x90
#1 MIT Robotic Manipulation (Lecture 5: Geometric Perception (Part1))




이번 수업 내용은 굉장히 어려워서 다음 챕터인 Lecture 6까지 듣고 정리하느라
조금 늦었다. 일단 Lecture 5만 다뤄보겠다.
간단하게 설명하면, 간단하지 않다.
SLAM의 기술에 대한 설명인데
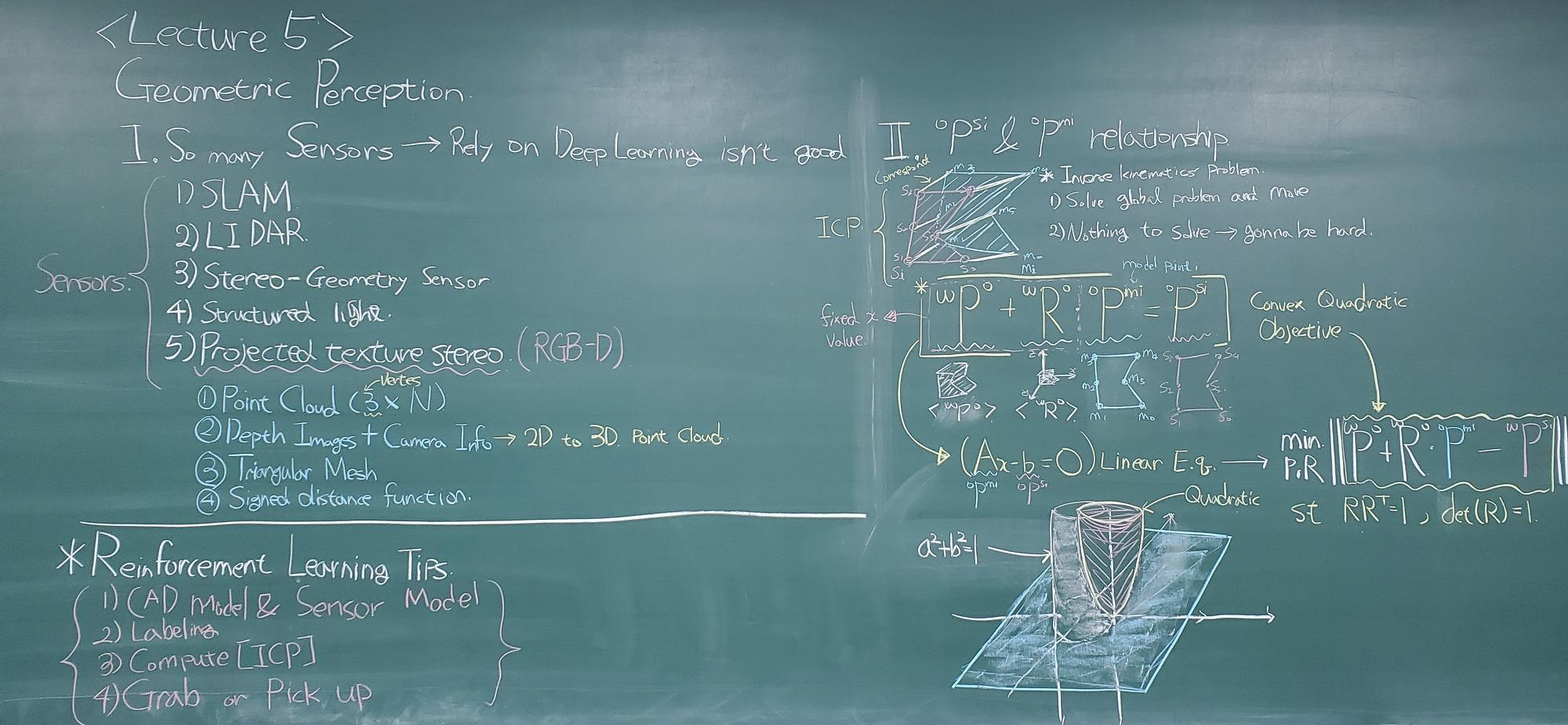
# I. So many Sensors
Chapter 1 에서는 Manipulation에서 사용되는 센서들에 대해 정리하고
이론적으로는 파란 글씨로 어떤 방법들이 존재하는지 설명해준다.
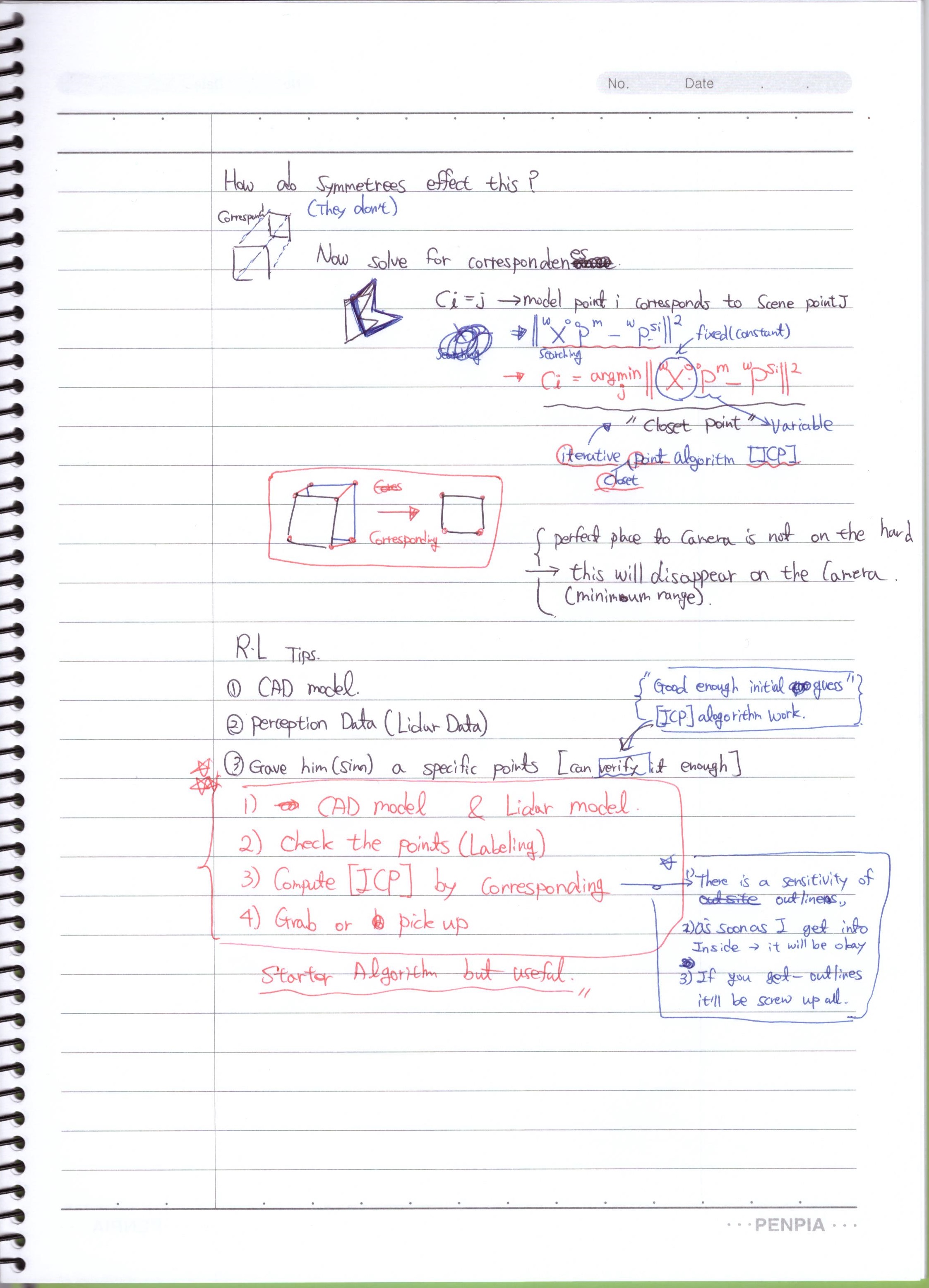
# II. Simulation Position & Model Positions' Relationships
SLAM의 Corresponding과정에 대해 디테일하게 다룬다.
이전 강의에서 배운 Optimization 식이 변수만 변경된 채로 나오고
Quadratic Graph가 또 나온다.
자세한 설명은 해당강의를 들으면 학생들의 질문사항까지 참고하면서 들을 수 있다.
간략하게 정리하면 model to sim으로 camera를 통해 본 model의 point들을 camera의 simulation과 맞추는 과정 같다.
이과정을 통해 우리는 vision perception을 거치고 manipulation에서 pick & grab을 수행할 수 있다고 한다.
Quadratic에 관한 내용을 이번 주 목요일에 교수님에게 여쭤보려고 한다.
'Robot Theory > MIT-Manipulation' 카테고리의 다른 글
| Manipulation 공부 하고 싶다. #7 [Geometric Perception (Part3)] (0) | 2022.01.10 |
|---|---|
| Manipulation 공부 하고 싶다. #6 [Geometric Perception (Part2)] (0) | 2022.01.10 |
| Manipulation 공부 하고 싶다. #4 [Basic Pick & Plane 2] (0) | 2021.12.28 |
| Manipulation 공부 하고 싶다. #3 [Basic Pick & Plane 1] (0) | 2021.12.25 |
| Manipulation 공부 하고 싶다. #2 [Reinforcement Learning Algorithm] (0) | 2021.12.23 |



