728x90
#1 MIT Robotic Manipulation (Lecture 2)
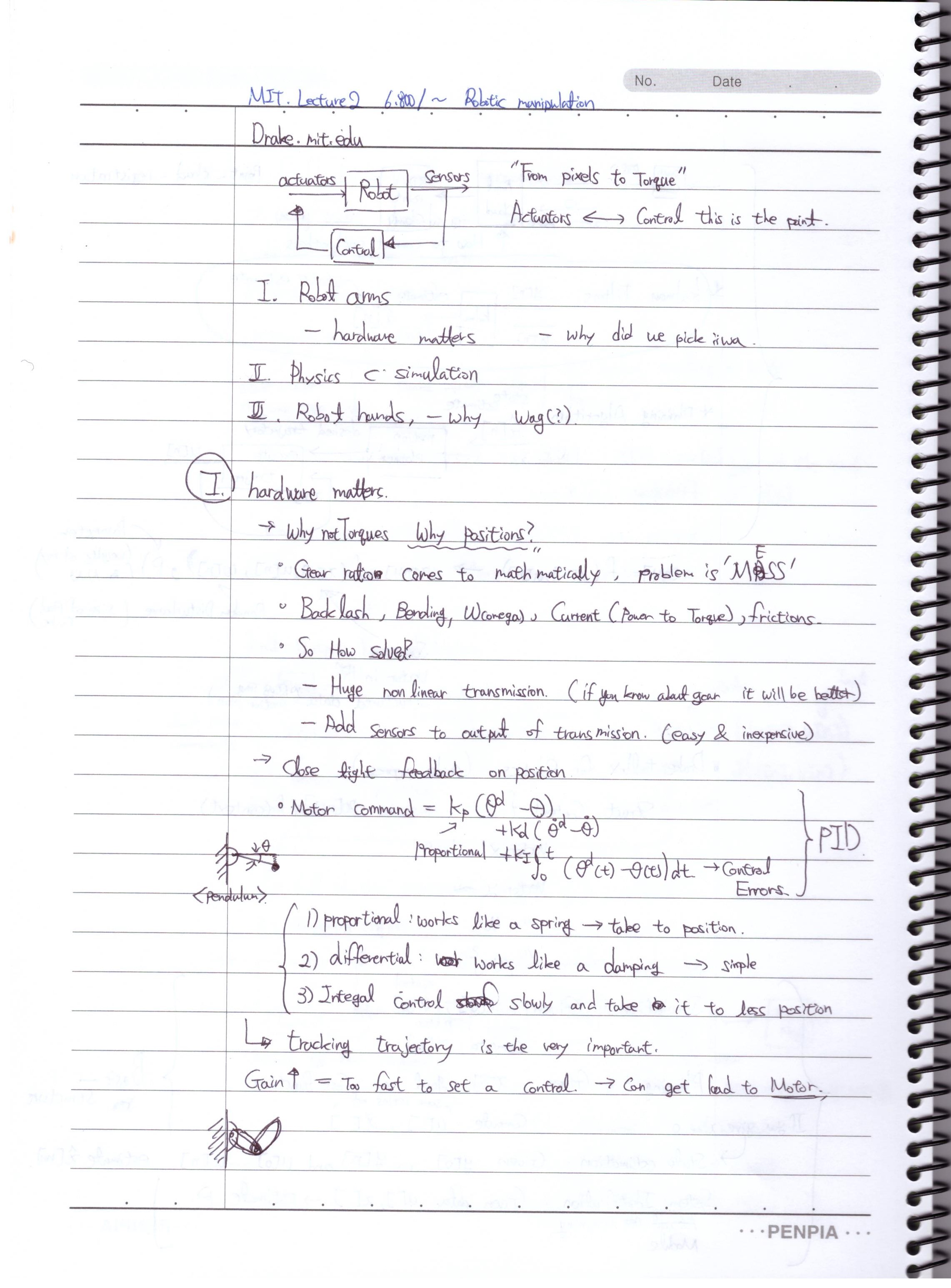
D -> Derivative인데 모르고 썼다가 배웠다.

F = ma 에서 어떻게 식이 전개되고 추가적으로 (기계적 측면) 생각하면 좋은 것들에 대해 짚어 주셨다.

토크가 MultiBody System을 거쳐서 어떤 결과를 내뿜는지 그리고
foward dynamics : 위치, 속도, 외부 토크 -> 가속도
inverse dynamics : 위치, 속도, 가속도 -> 외부 토크
위의 방식대로 기계를 컨트롤 할 수 있는데, inverse 방식이 더 유용하고 편한편이다.
하지만 상황 따라 다르기에 환경과 에이전트의 상황을 보고 결정하는 것이 좋아보인다.
아마 계속 공부하면 둘 중 무엇이 좋은지 알 수 있을거 같아서 행복하다.
재밌다.
'Robot Theory > MIT-Manipulation' 카테고리의 다른 글
| Manipulation 공부 하고 싶다. #6 [Geometric Perception (Part2)] (0) | 2022.01.10 |
|---|---|
| Manipulation 공부 하고 싶다. #5 [Geometric Perception (Part1)] (0) | 2022.01.03 |
| Manipulation 공부 하고 싶다. #4 [Basic Pick & Plane 2] (0) | 2021.12.28 |
| Manipulation 공부 하고 싶다. #3 [Basic Pick & Plane 1] (0) | 2021.12.25 |
| Manipulation 공부 하고 싶다. #1 (0) | 2021.12.22 |



