728x90
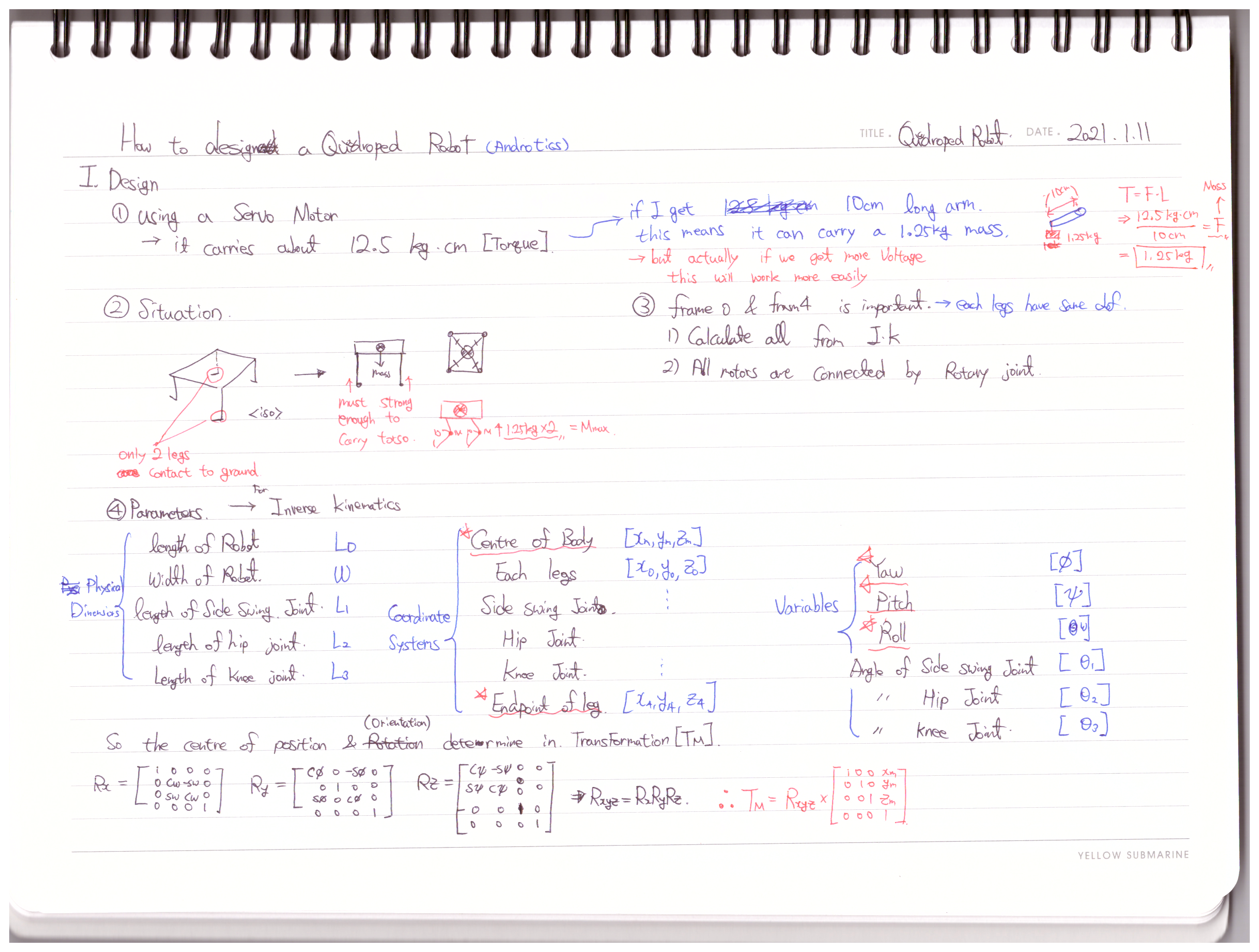
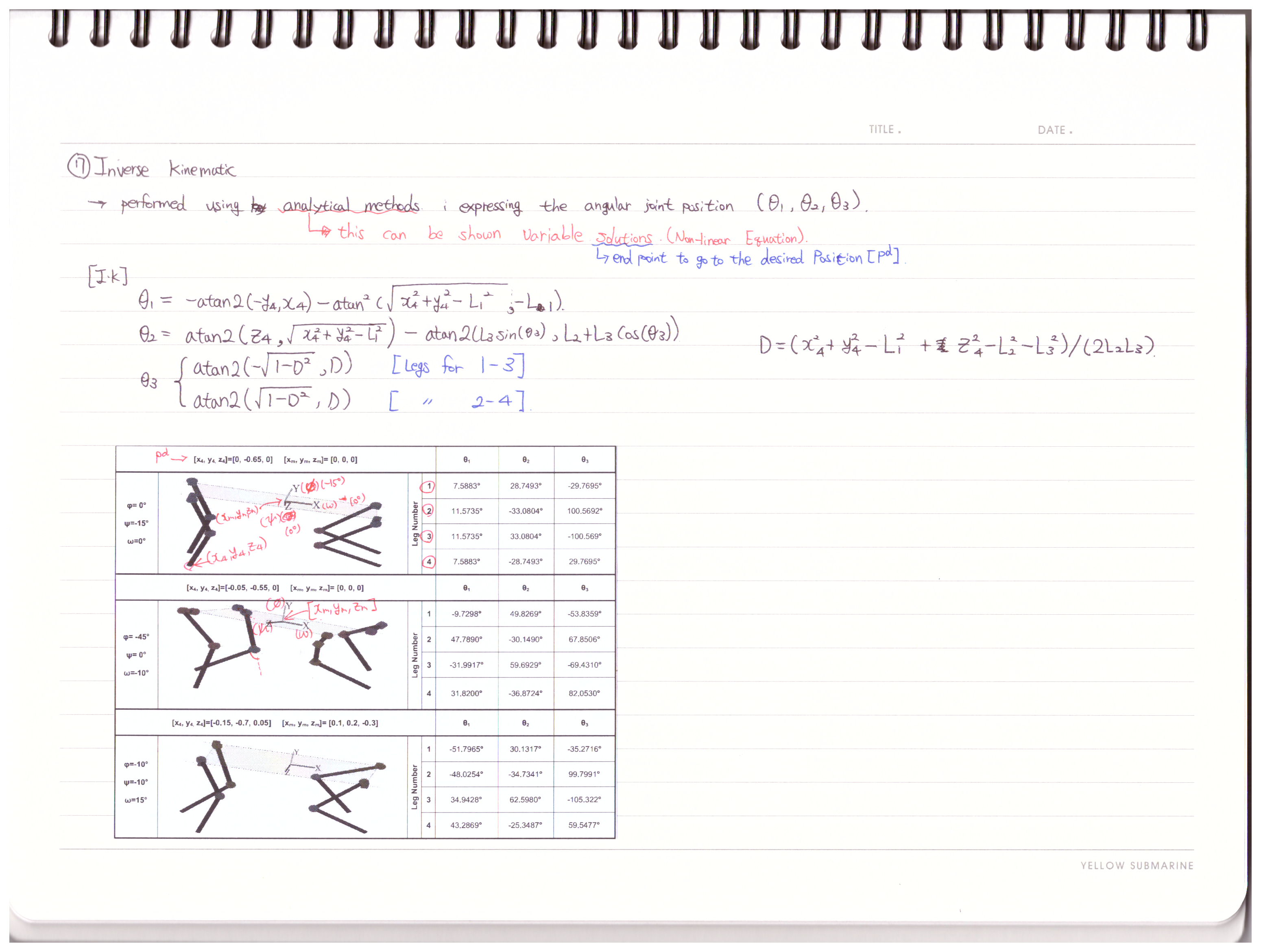
#1 Inverse Kinematic Analysis Of A Quadruped Robot

프로젝트 초점이 4족 보행으로 옮겨가면서, 새롭게 공부를 시작하는 중이다.
기구학 쪽에 그렇다 할 지식이 없었는데,
일전의 Manipulation을 들으면서 배운 Position, Rotation, Tranformation, Pose 등의 개념을 이해하고
좌표계의 설정과 Matrix 연산에 대해 공부한 경험으로
Inverse Kinematic Analysis Of A Quadruped Robot [1] 논문을 읽는데 큰 어려움이 없었다.
[Reference]
[1] Muhammed Arif Şen, Veli Bakırcıoğlu, Mete Kalyoncu, "Inverse Kinematic Analysis Of A Quadruped Robot", International Journal of Scientific & Technology Research, October 2017
https://www.researchgate.net/publication/320307716_Inverse_Kinematic_Analysis_Of_A_Quadruped_Robot



